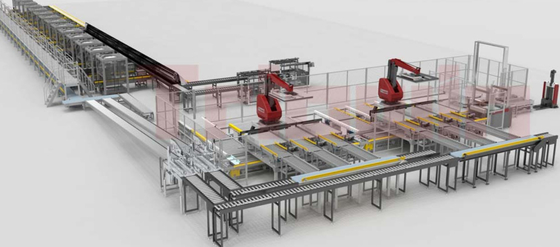
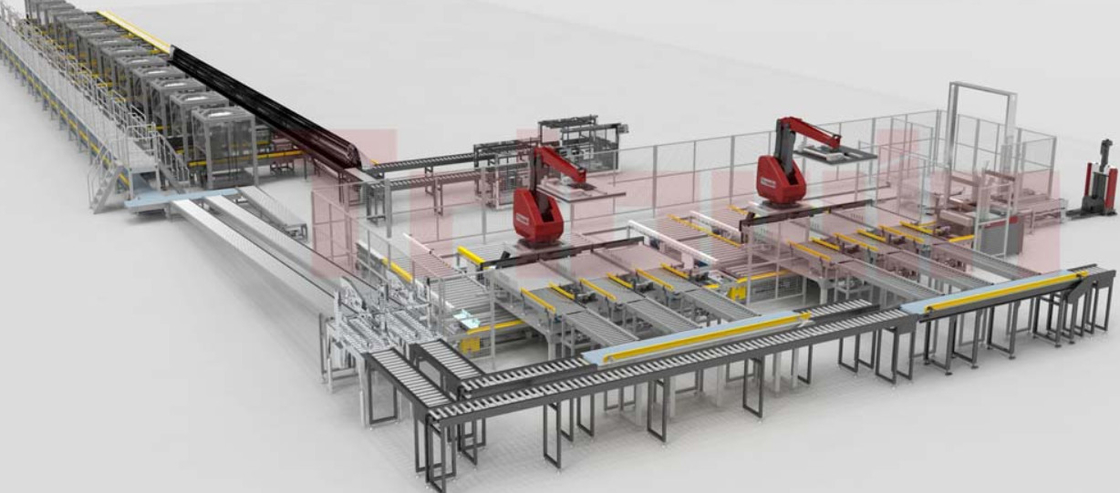
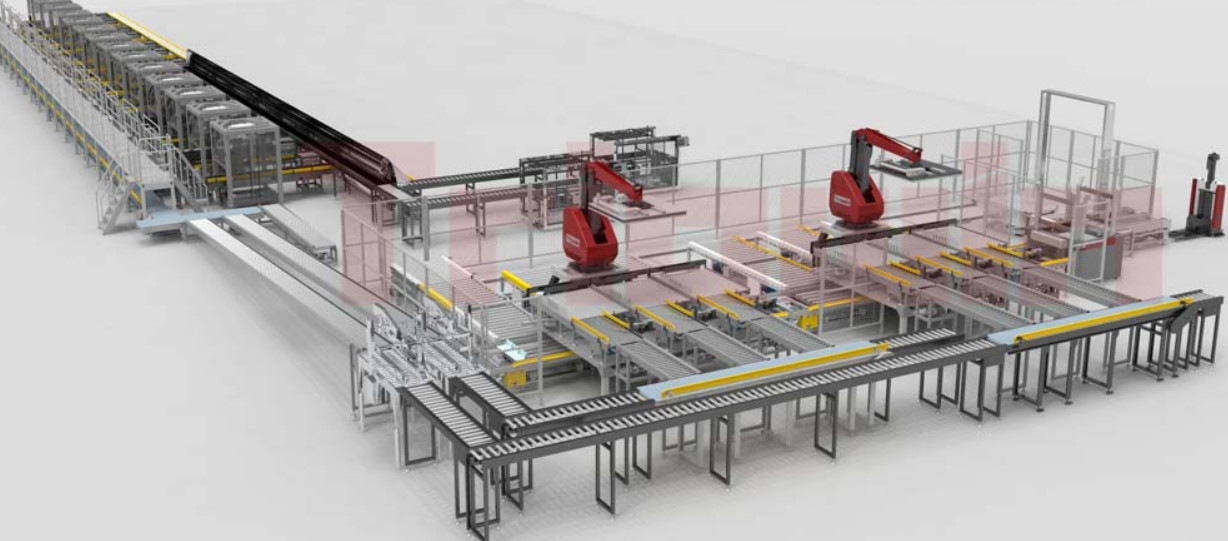
Περιγραφή του προϊόντος
Ο μοναδικός γραμμικός ενεργοποιητής του ρομπότ, εξοικονόμηση ενέργειας σχεδιασμός του βραχίονα, απλή λειτουργία διεπαφής ανάπτυξη κατανόηση, για τους πελάτες των διαφορετικών γραμμών παραγωγής,υλικά προσαρμοσμένα σε επαγγελματικές λύσεις ρομπότ, εξαιρετική ακρίβεια και ταχύτητα, υψηλή απόδοση και σταθερότητα των επιδόσεων, ώστε να είναι δυνατόν να ολοκληρώσει ένα ρομπότ πολλές γραμμές παραγωγής ταυτόχρονα,χωρητικότητα φορτίου ρομπότ 120-300 kg, εφαρμόζεται στις ζωοτροφές, τα χημικά προϊόντα, τα σιτηρά και τα έλαια, τα τρόφιμα, τα οικοδομικά υλικά, τα καθημερινά χημικά, το αλκοόλ, τα ποτά, τα φαρμακευτικά προϊόντα, τις οικιακές συσκευές, την ηλεκτρονική 3C και άλλες βιομηχανίες.
ΠΡΟΤΑΓΜΟΣ
1 μοναδικός γραμμικός ενεργοποιητής: έξυπνος μηχανισμός τεσσάρων βαρών, έτσι ώστε το πρόγραμμα δράσης του χειριστή να είναι απλούστερο και πιο ακριβές.
2 εξοικονόμηση ενέργειας σχεδιασμός ρομπότ προστασίας του περιβάλλοντος χέρι: υψηλής αντοχής παραγωγής κράματος αλουμινίου, όχι μόνο καθιστά την κίνηση του χεριού πιο ευέλικτη, αλλά και να μειώσει την κατανάλωση ενέργειας.
3 Απλή λειτουργία διδασκαλίας και φιλική γραφική διεπαφή λειτουργίας: η θέση διδασκαλίας είναι λίγη, η διεπαφή λειτουργίας είναι απλή,που διευκολύνει το on-site debugging και βελτιώνει σημαντικά την on-site αποδοτικότητα.
4 παρακολούθηση επί τόπου σε πραγματικό χρόνο: λογισμικό προσομοίωσης δράσης επί τόπου υψηλής ακρίβειας, το οποίο μπορεί να γνωρίζει εξ αποστάσεως εάν το πρόγραμμα επί τόπου λειτουργεί κανονικά,Η αυτόματη παρακολούθηση παρεμβολών αποτρέπει την σύγκρουση παρεμβολών.
5 προσομοίωση πριν από την τοποθέτηση: χρησιμοποιώντας ισχυρό λογισμικό προσομοίωσης/προγραμματισμού 3D, μπορεί εύκολα να ολοκληρωθεί στον τομέα του προγραμματισμού, της τοποθέτησης, της παρακολούθησης παρεμβολών,Η προσομοίωση δράσης πεδίου και άλλες εργασίες γίνονται απλές και αποτελεσματικές, μειώνοντας έτσι σημαντικά το χρόνο ελεγκτικής επεξεργασίας πεδίου, βελτιώνοντας τη συνολική αποτελεσματικότητα της παραγωγής.
Ευέλικτος προγραμματισμός:
1 Μέθοδος διδασκαλίας με χειροκίνητο τρόπο: ο πιο διαισθητικός τρόπος διδασκαλίας της αναπαραγωγής, και στη συνέχεια η περίπλοκη μορφή της στοίβασης μπορεί εύκολα να αναπαραχθεί.
2 Τρόπος προγραμματισμού εκτός γραμμής: ο προγραμματισμός και η ανίχνευση της διαδικασίας μπορούν να ολοκληρωθούν σε κατάσταση εκτός γραμμής και τα προγράμματα ρομπότ μπορούν να προετοιμαστούν εκ των προτέρων για τη βελτίωση της αποτελεσματικότητας της εργασίας πεδίου.
3 Γραφικός προγραμματισμός: τα δεδομένα παλετοποίησης μπορούν να δημιουργηθούν με την εισαγωγή διαφόρων παραμέτρων πληροφοριών παλετοποίησης μέσω μιας διεπαφής ανθρώπου-μηχανής που βασίζεται στην αφής.


 Το μήνυμά σας πρέπει να αποτελείται από 20-3.000 χαρακτήρες!
Το μήνυμά σας πρέπει να αποτελείται από 20-3.000 χαρακτήρες!